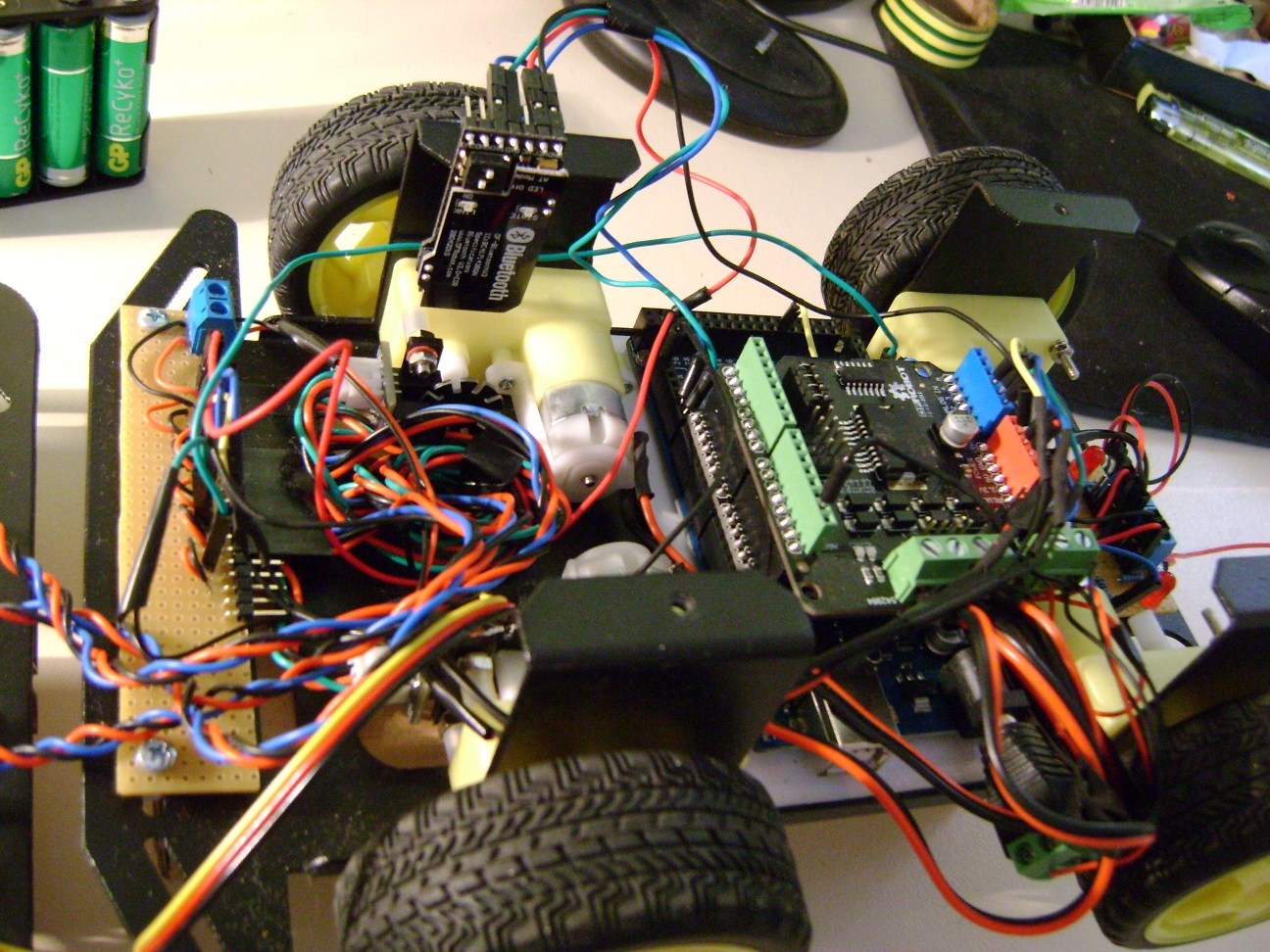
Specification:
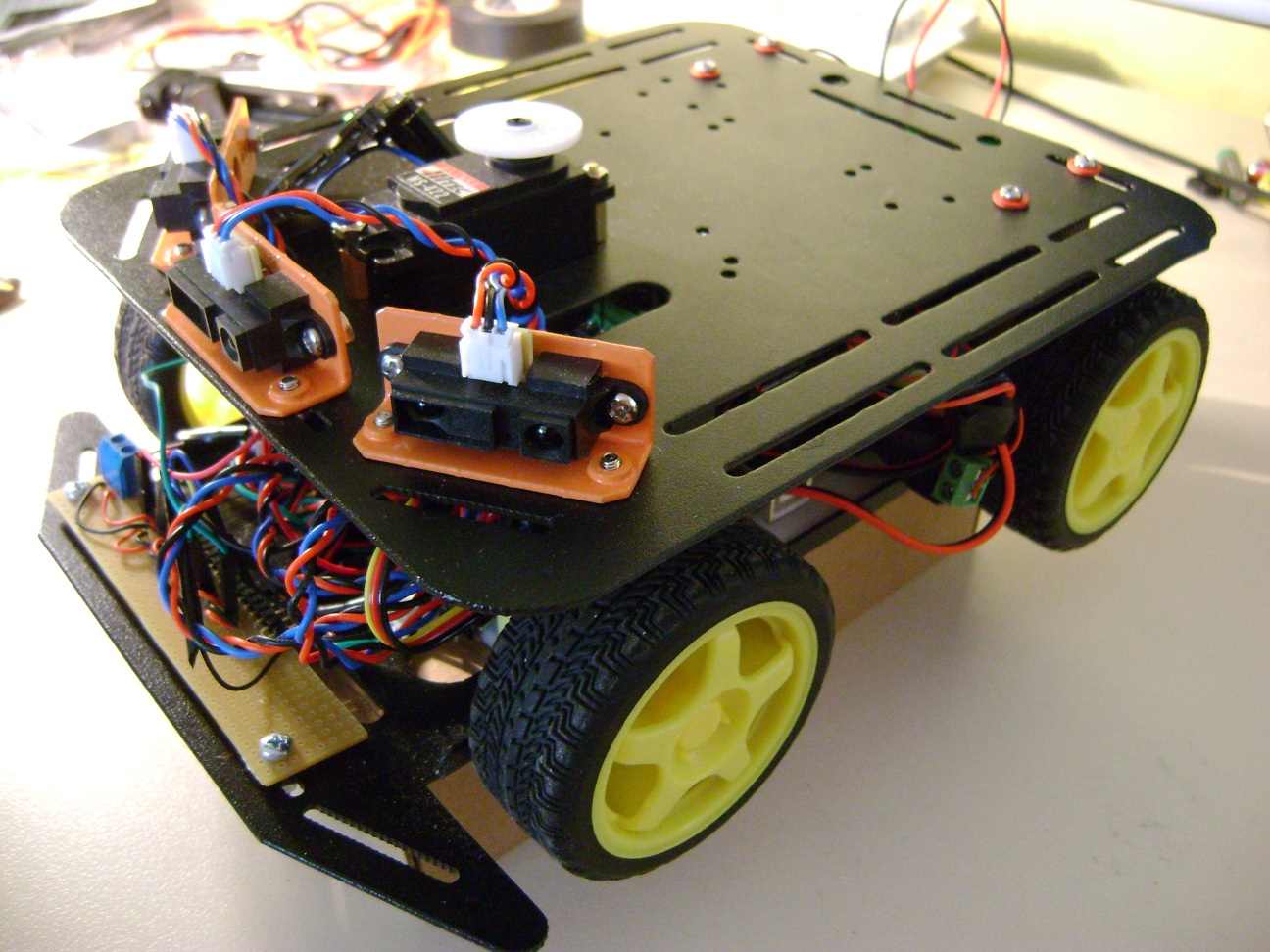
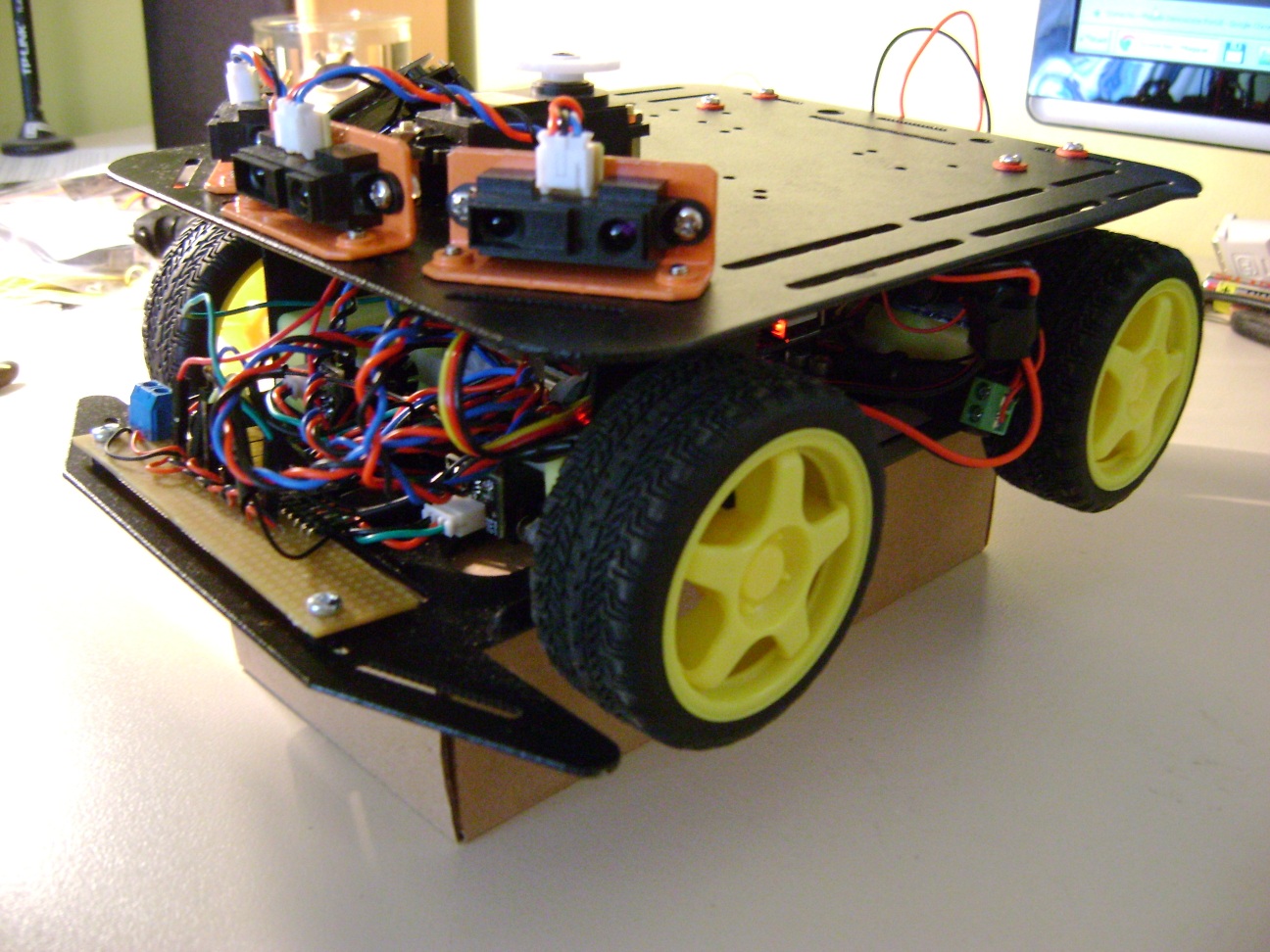
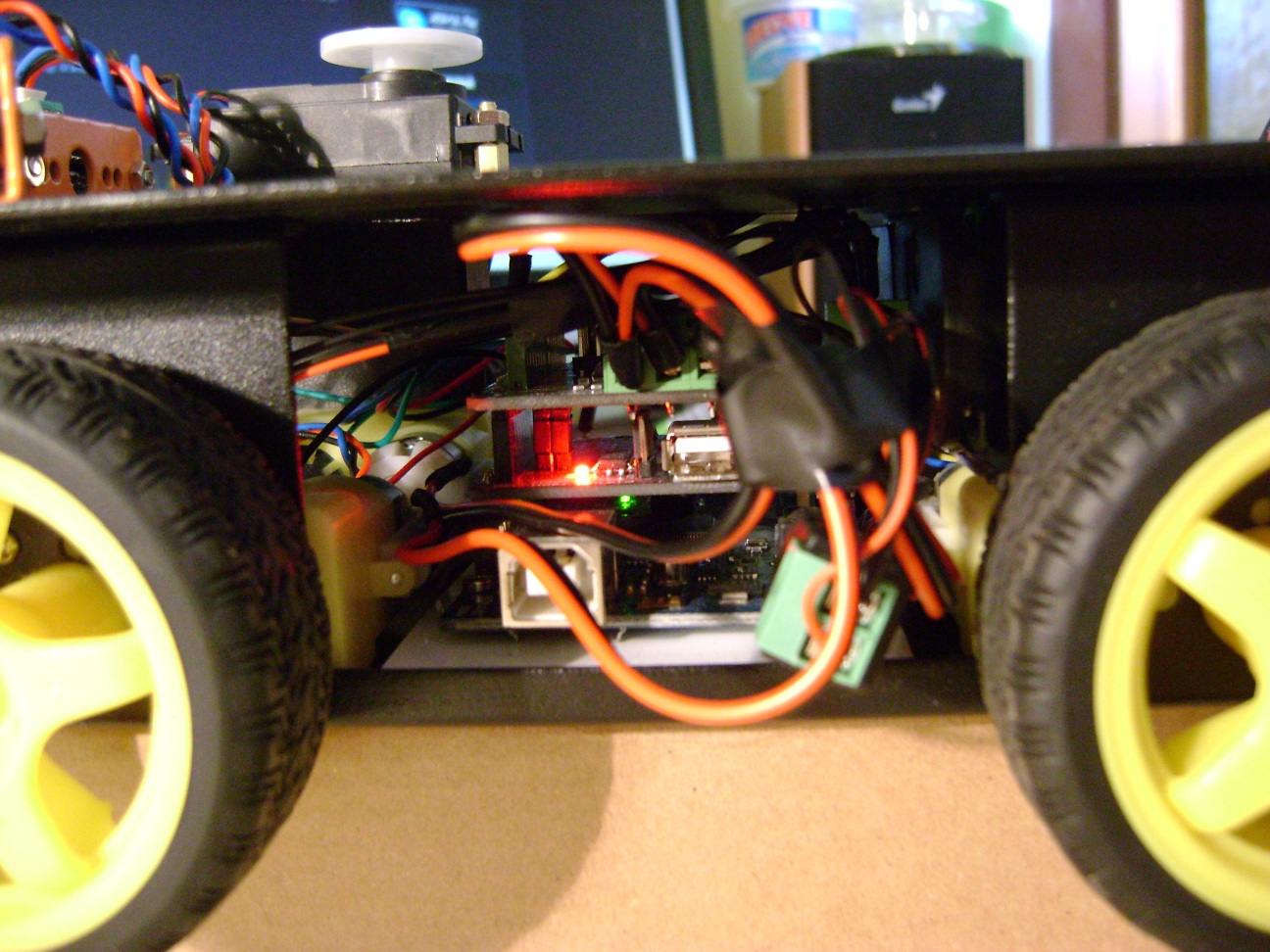
Components
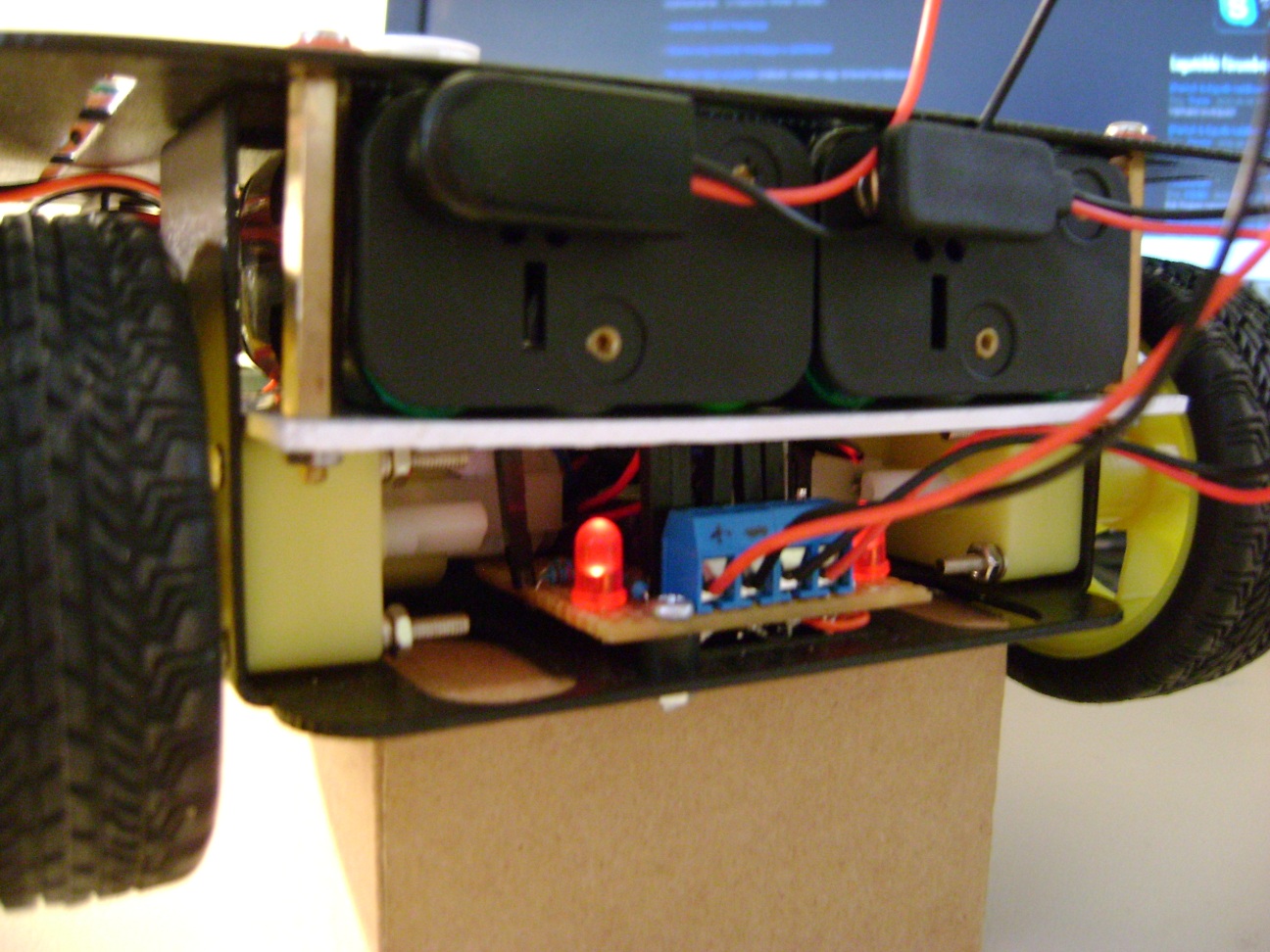
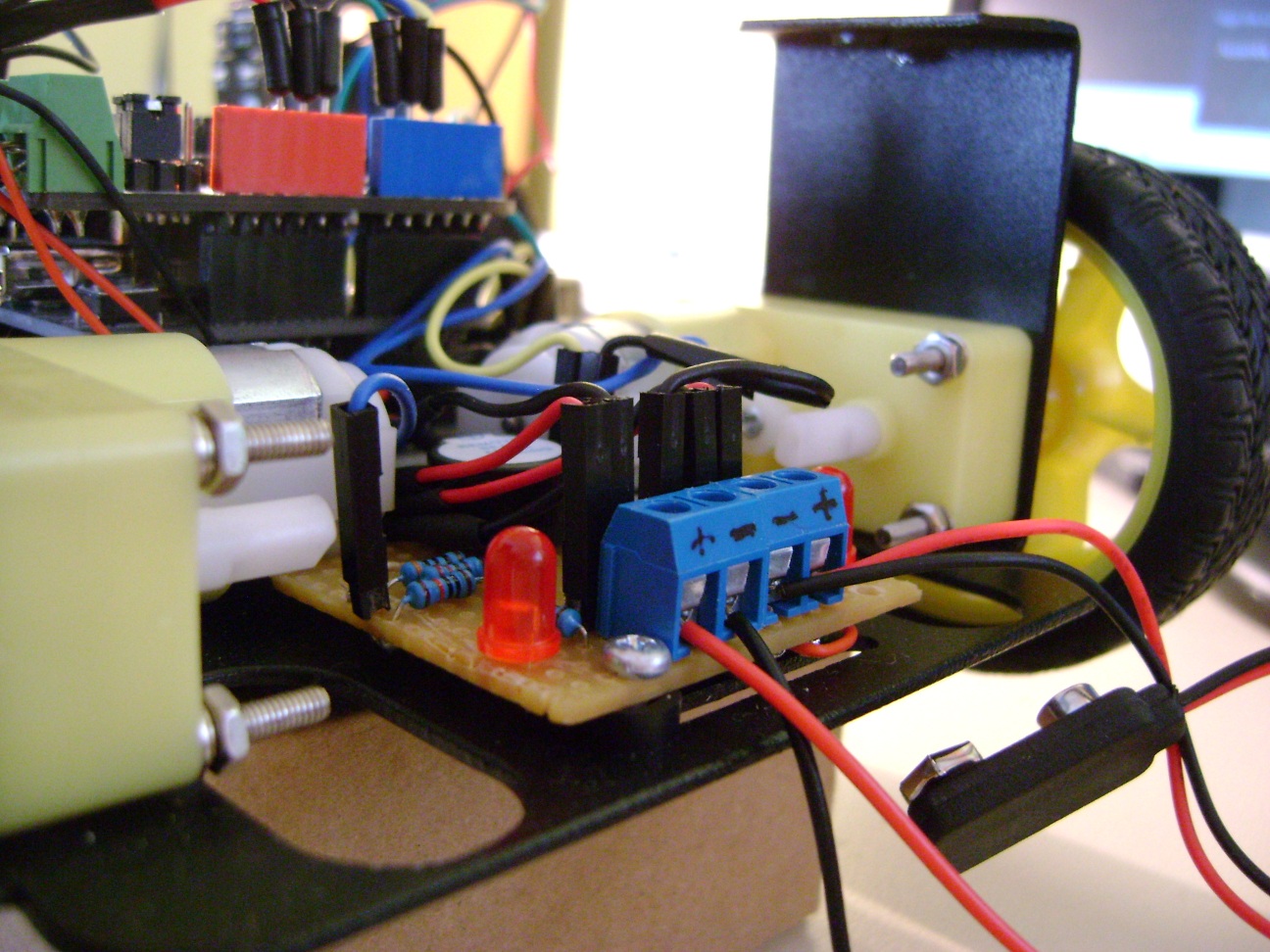
- 2 battery pack (separated from dc motor - 12 x NiMH)
- 3 IR distance sensor (10-80cm)
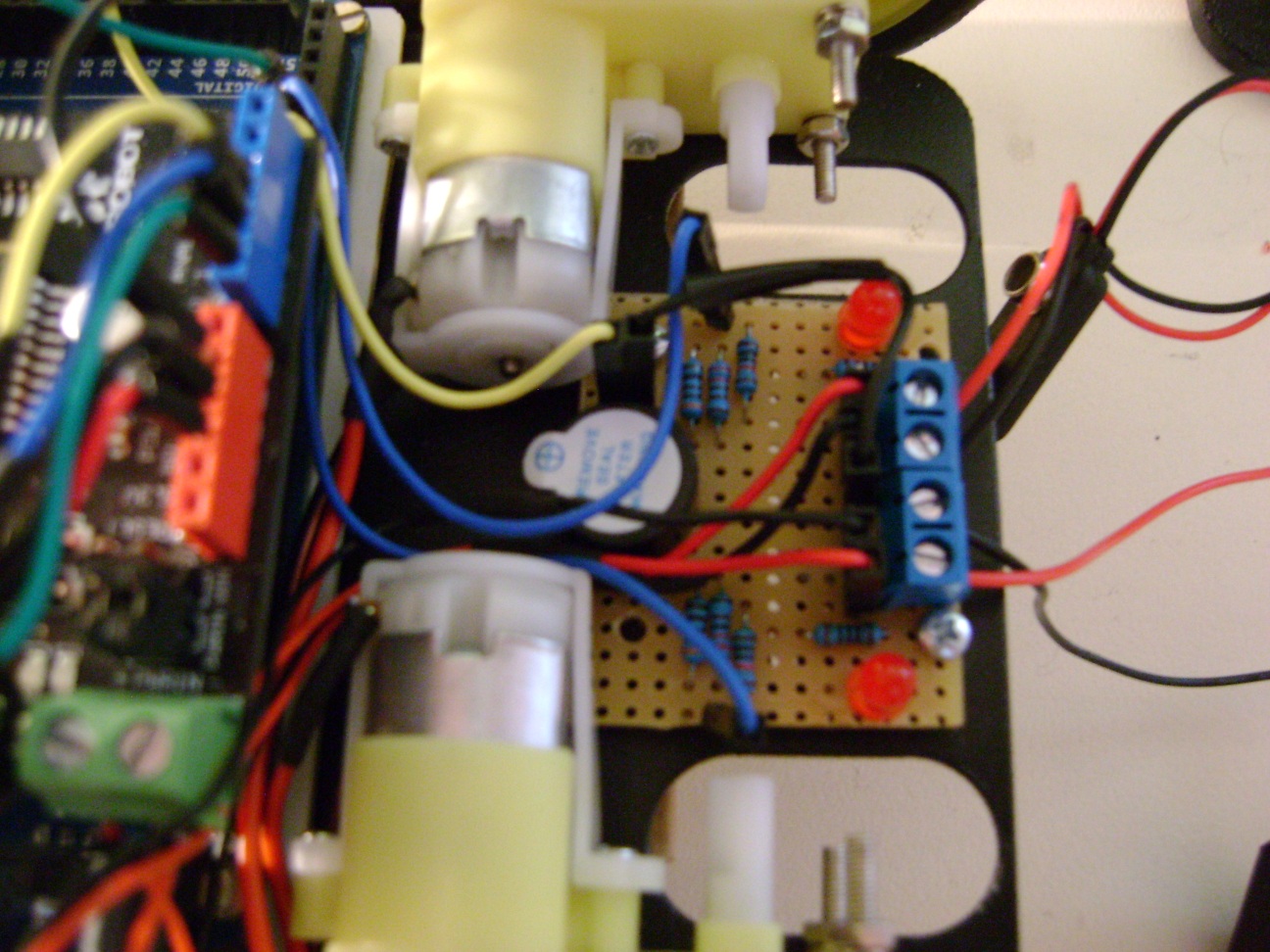
- 1 Buzzer
- 2 Voltage Divider
- 1 servo (but offline)
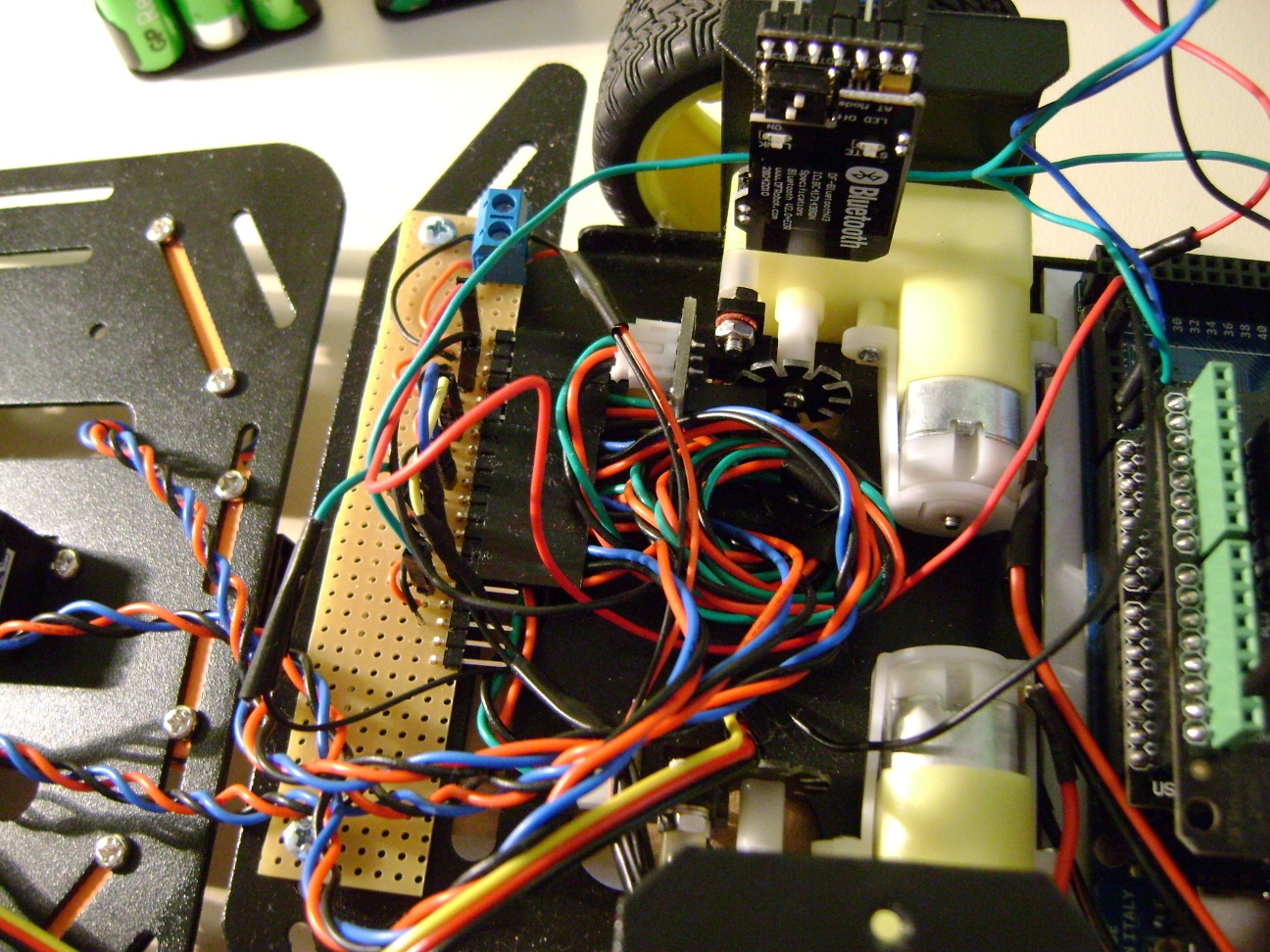
- 1 bluetooth adapter
- 1 dfrobot baron platform (with encoder)
- 1 dfrobot motor shield
- 1 dfrobot USB host shield (for future use)
- 1 Arduino Mega microcontroller
Control modes
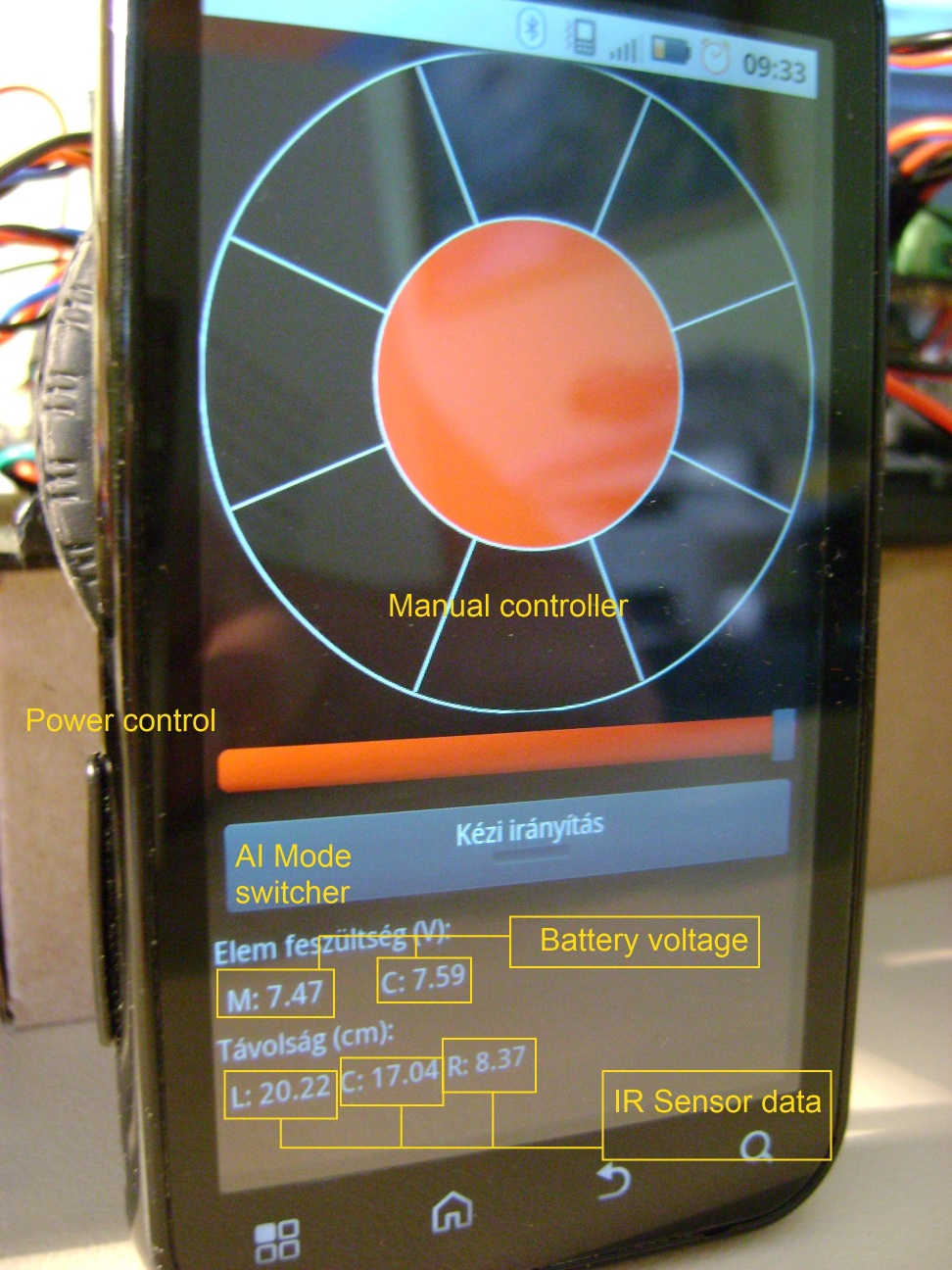
- Manual from android phone over bluetooth
- From serial port with text command (parallel with phone)
- Simple avoidance AI
AI algorithm
Source code:
Images, videos: